还不会用LoRa模组?看这一篇就够了!
LoRa模组凭借其优异的射频性能和稳定性,被广泛应用于各类物联网应用中,本文将为大家介绍致远电子官方驱动代码的移植关键步骤,适用于ZM4xxSX-M系列LoRa射频模组。
为了加快用户LoRa球盟会(中国)官方网站的开发进度,致远电子已经实现了其底层驱动。用户移植驱动代码后,只需要专注于自己的球盟会(中国)官方网站功能开发即可。致远电子官方LoRa驱动代码链接如下,用户可免费下载!

在介绍驱动代码的移植之前先简单说一下驱动的目录结构:
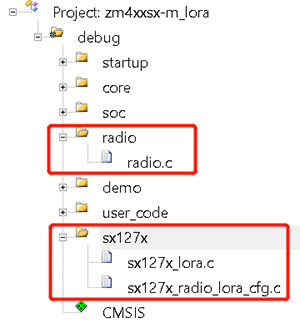
LoRa驱动代码目录结构
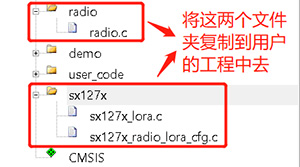
在该驱动例程中,前三个文件夹:startup、core、soc与具体用户的MCU相关,不用移植。Demo文件夹下面放的是致远电子提供的例程代码,用户可以选择性移植。User_code文件夹下存放用户的应用程序,可以不用移植。真正且必须移植的是radio和sx127x这两个文件夹下面的代码,这两个文件夹下包含的是驱动和配置代码。
在移植代码之前需要注意:
1.确认 MCU 与 ZM4xx 模组相连的引脚可配置为上下拉模式的,有客户在使用过程中出现复位或 SPI片选引脚输出高电平时电平只有 2.0V,从而导致模组复位异常或 SPI 通信不正常。原因是该 MCU 引脚无上下拉模式,需要靠外部接上拉电阻才能把电平拉高
2.客户在移植驱动时,除非是编译问题,否则不能修改 sx127x.c 里面的内容,也不能把spi 函数写在 sx127x.c 里面,我们只需要用户从 sx127x_radio_lora_cfg.c 文件将 spi 函数传入即可。
驱动移植
用户只需要修改sx127x_radio_lora_cfg.c文件内容即可。首先用户需要提供以下函数:
1.准备SPI驱动
ZM4xxSX-M系列的LoRa模组都是使用SPI接口通信,用户仅需要提供SPI读字节和写字节的函数即可。其用户MCU主机SPI特性如下;- SPI主机采用模式0,CPOL=0和CPHA=0;
- 全双工通信;
- 数据长度8位,MSB通信;
- SPI速度需要小于10M;
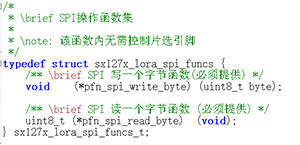
用户SPI操作函数
注意:用户无需在SPI读写函数内部操作CS片选引脚,函数内部只需要单纯发送或接收一个字节的数据即可。
2.准备GPIO操作驱动
模组除了SPI的SCK、MISO、MOSI引脚之外,还有片选引脚和复位引脚,驱动中需要对这两个引脚进行操作,因此需要用户提供这两个引脚的GPIO操作函数:设置引脚电平函数(RESET和CS引脚初始化时需要设置为上拉输出高电平)。
GPIO操作驱动
3.提供延时函数
ZM4xxSX-M内部读写寄存器有一定的时序要求,所以需要用户提供延时函数。包括微秒延时和毫秒延时两个函数。注意必须是精准的延时,不能是软件循环延时,因为需要驱动有发送超时,如果延时不精准容易到时发送失败。
延时函数
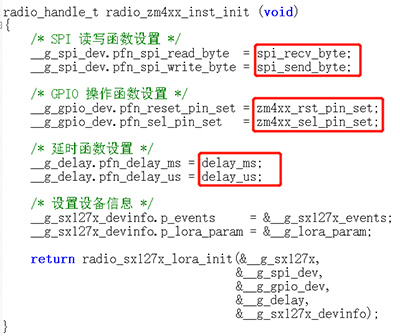
准备好上述函数后,用户需要将这些函数注册到驱动里面。sx127x_radio_loar_cfg.c文件提供了一个模板,如图所示。用户只需要将上述说的三种函数对应替换成自己的函数即可,其他地方不必修改。
当用户完成上述两个大步骤之后,用户需要在模组初始化之前自行完成SPI、GPIO和延时功能的初始化。然后参考致远官方例程中的main()函数中的内容,进行验证自己移植的程序是否可以正常工作。
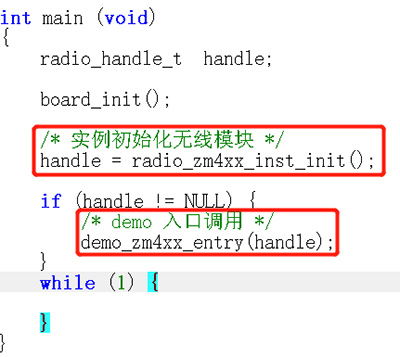
如果无线模组初始化函数:radio_zm4xx_inst_init()返回值!=0,则说明初始化成功,SPI通信没问题。然后可以参考致远电子提供的无线收发demo程序:demo_zm4xx_entry(handle),如果模组能够正常通信说明该LoRa的驱动代码到此移植成功!


